Ice Detection Buoy
Location of the Data
The Need
Federal agencies and the oil and gas industry require accurate methods for predicting sea ice formation. Premature or delayed cessation of marine operations based on inaccuracies in either model predictions or satellite detection of sea ice formation can be costly and have implications for the safety of offshore operations. Oceanographers and forecasters have long struggled with finding a way to measure upper water column stratification and heat content through the fall up to the time of freeze-up in ice-covered seas.
The goal of this IOOS Ocean Technology Transition (OTT) project was to develop and test an economical sensor package that could be used operationally (real time) by stakeholders needing accurate information of the water column conditions leading up to the onset of fall ice formation. The Ice Detection Buoy (IDB) sensor system was developed specifically to provide the necessary real time data on the vertical temperature and salinity structure of the shelf. This information is important for evaluating and refining NOAA and National Weather Service (NWS) sea ice forecast models (both existing models and those under development), because these models depend upon accurately predicting the seasonal evolution of the thermohaline structure of the ocean during ice formation/freeze up. Data will also guide refinement of remote sensing algorithms for frazil ice detection, a notoriously difficult process to be distinguished by remote sensing platforms.

Project Location
The original project lacked dedicated vessel time of its own, so the deployment test site was selected to be co-located with the Chukchi Ecosystem Observatory (CEO) in the NE Chukchi Sea, a site which hosts annual visits by oceanographic vessels. The CEO is an AOOS-supported multi-mooring installation that records physical, chemical, biological and geological data sets.
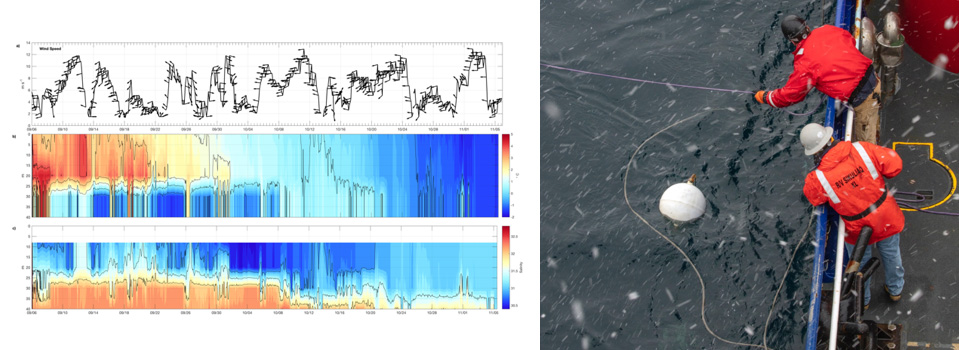
The first prototype IDB (see schematic) was deployed on September 6, 2015 approximately 76 miles NNW of Wainwright in the Chukchi Sea, and provided real time data up through the freeze-up, as determined by the mooring data itself and coincidental satellite imagery. A second (new, but nearly identical) IDB was deployed in 2017, modified to avoid potential drag by ice keels suspected in the cause of the 2015 mooring over-winter disappearance. This second buoy successfully transmitted real time data through the World Meteorological Organization Global Telecommunications System (WMO GTS), which disseminates data in near-real time to operational weather and ocean forecasting centers, and enables global distribution of real time data (Buoy WMO 4801730). The third IDB deployment took place in August 2018; however, this deployment occurred with the presence of ice floes in the area and the mooring transmitted only for a couple of days before losing contact. The buoy was subsequently recovered by a passing research vessel that was able to locate it, but the surface float and data transmission antenna were damaged and therefore, the mooring was not redeployed.
Project Details
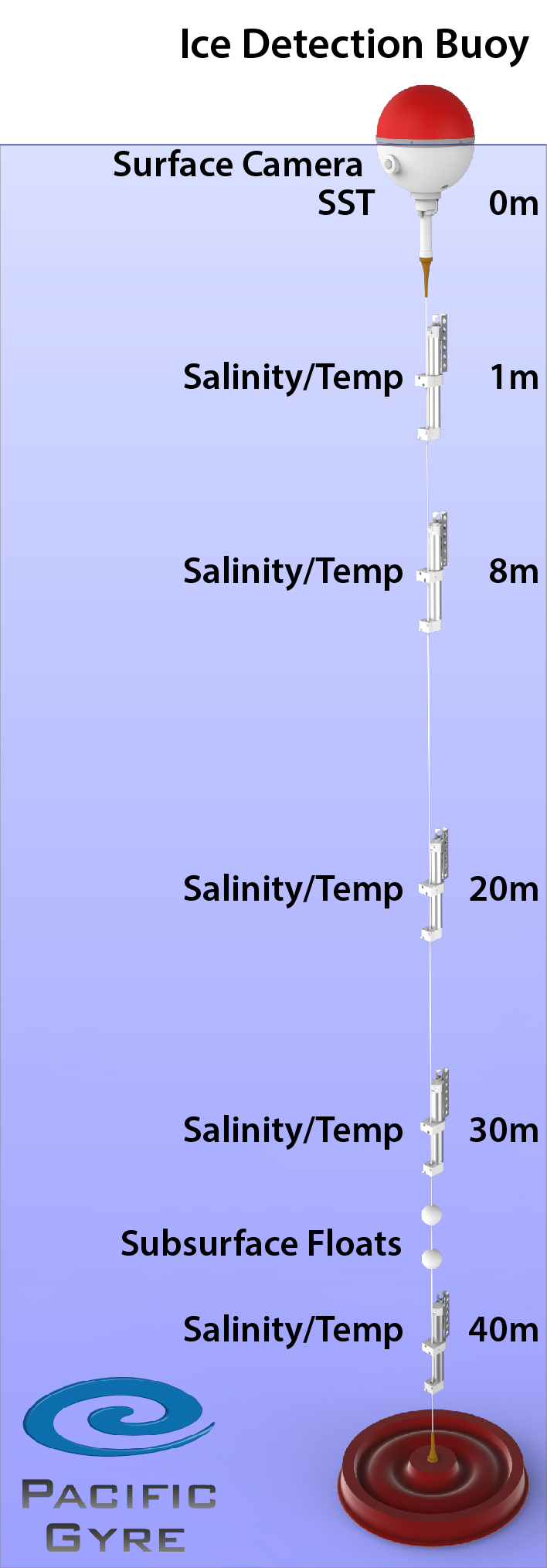
Researchers at the University of Alaska Fairbanks College of Fisheries and Ocean Sciences and industry partner Pacific Gyre developed and deployed an economical mooring package designed to provide full water column heat content and stratification data in real time to scientists at the University of Alaska Fairbanks (UAF), forecasters at the National Weather Service (NWS), and others. The Ice Detection Buoy (IDB) mooring, also referred to as the Freeze-up Detection Mooring, is outfitted with an expendable surface float that houses a satellite communications package, a tether release, an inductive modem, and a sea surface temperature sensor. The surface float is connected to as many as four Sea-Bird Electronics’ SBE 37 inductive modem CTDs (conductivity-temperature with depth instruments) that transmit hourly temperature, conductivity and pressure to the surface float from multiple subsurface depths (8, 20, 30, and 40 m). The first mooring deployed in 2015 was also equipped with a sub-surface camera intended to record and send digital images of the upper water column; however, the camera portion never worked well and was abandoned in later iterations. The mooring design allows for only a small expendable portion of the mooring to be lost to the ice while providing much needed realtime water column stratification information running up to freeze-up.
Project Highlights
Successes
- The project resulted in 3 deployments of the prototype Ice Detection Buoy in 2015, 2017, and 2018.
- The designed mooring system collected data throughout the water column on the 45 m deep Chukchi Sea shelf and transmitted these data in real time during the 2015 and 2017 freeze-up cycles.
- In 2015, the expendable surface float was successfully separated from the subsurface mooring at the instruction of a remotely triggered command by UAF scientists. The release trigger was sent as the water column mixed-down completely, indicating the imminent onset of freeze-up. Coincidental information on newly forming sea ice occurring near the mooring site was also observed using daily satellite imagery provided by the National Sea Ice Data Center, prompting the final decision to release the float.
- The National Weather Service (NWS) appreciated the real time data on water column conditions made possible during the initial IDB trial in 2015, which motivated NWS support for developing a second IDB system to be deployed in 2017.
- IDB data from 2017 were made available via the WMO GTS for direct access and use by NWS Alaska Sea Ice Program (ASIP) ice forecasters.
> The water column data were utilized by ASIP analysts working on daily ice analysis and 5-day sea ice forecast products to gain a better understanding of how the upper levels of the water column were behaving. This information was then used while analyzing current satellite imagery in the vicinity of the buoy to get a more complete view of the coupled atmosphere/ice/ocean system.
> The analysts also utilized the buoy data when working on producing the monthly issued 3-month sea ice outlook product, examining trends in the water column profiles and using this as supplemental information when forecasting timing of freeze-up at locations near the buoy.
> The data captured by the buoy also indirectly supports the ASIP by enhancing model ground-truth validation.
> A third deployment of a lesser-instrumented (lower cost) mooring was carried out in 2018 with logistical support provided by IOOS. This deployment was cut short due to drifting sea ice interference not long after the buoy was put in the water. The mooring was subsequently returned to UAF for evaluation and repair.
The concept of this mooring has been since replicated by at least one other oceanographic innovation group at the NOAA Pacific Marine Environmental Laboratory. The PMEL iteration of the design consists of a self-flooding and sinking surface float that subsequently re-surfaces the following year using compressed air.
Challenges
- The first IDB mooring deployed in 2015 was lost sometime after the surface float was released, likely due to ice keel drag, or possibly a failed acoustic release. The mooring was never recovered.
- The slightly premature release of the 2017 IDB mooring surface float just before freeze-up was not intentional, rather likely caused by large waves.
- Movement of the 2018 IDB mooring, damage to the surface float and the destroyed iridium antennae was likely due to drifting sea ice observed in the area soon after deployment.
Resources
- http://research.cfos.uaf.edu/artlab/projects/IceDetectionBuoy/index.php
- http://research.cfos.uaf.edu/artlab/projects/IceDetectionBuoy/data_display.php
- https://ioos.noaa.gov/project/ott-real-time-sensor-system-detecting-freeze-arctic-shelves/
Publications and Professional Presentations
Danielson, S.L., L. W Cooper, C. Hauri, J. K. Horne, C. Lalande, A.R. Mahoney, K. Stafford, T. Weingartner and Peter Winsor, 2018, On the evolution, maintenance, and role of stratification at the Chukchi Ecosystem Observatory (CEO) site in the northeast Chukchi Sea, AGU/ASLO 2018 Ocean Sciences Meeting, Portland, OR.
Hauri, C., S.L. Danielson, A.M.P. McDonnell, R.R.H. Hopcroft, P. Winsor, P. Shipton, C. Lalande, K.M. Stafford, J.K. Horne, L.W. Cooper, J.M. Grebmeier, A. Mahoney, K. Maisch, M. McCammon, H. Statscewich, A. Sybrandy, and T. Weingartner, 2018. From sea ice to seals: A moored marine ecosystem observatory in the Arctic, Ocean Science, 14, 1423-1433, https://doi.org/10.5194/os-14-1423-2018 12
Janzen, C.D., S.L. Danielson, P. Winsor, M. McCammon, C. Hauri, R.R. Hopcroft, C. Lalande, A. McDonnell, K. Stafford. 2016. What is going on up there? The Chukchi Sea Ecosystem Mooring. AGU/ASLO 2016 Ocean Sciences Meeting, New Orleans, LA
Janzen, C.D., M. McCammon, S.L. Danielson, T. Weingartner, H. Statscewich, E. Page, and B. Heim, 2019. Innovative Real-Time Observing Capabilities for Remote Coastal Regions, Front. Mar. Sci., 6 doi: 10.3389/fmars.2019.00176
Funding Sources & Partners
IOOS OTT Project, NOAA-NOS IOOS Program Grant # NA14NOS0120147
NOAA – NOS IOOS Program through Grant # NA16NOS0120027
NOAA – NWS through Grant # NA16NOS0120027 University of Alaska, Fairbanks, CFOS
Acknowledgements
Crew of the R/V Sikuliaq, Dr. Carin Aishen for recovering the 2018 IDB mooring.
Principal Investigators

University of Alaska, Fairbanks, CFOS

University of Alaska, Fairbanks, CFOS

University of Alaska, Fairbanks, CFOS

Pacific Gyre, Inc.